
摘 要:文章基于声源定位技术研发出一款在移动过程中自动避障的小车,其以 STM32F103C8T6为主控开发板,将 K210 搭载麦克风阵列作为声源处理装置,并且采用时延算法得出声源到达不同麦克风阵列的时间差,从而计算出声源和小车的距离以及角度。为了使角度更加准确,加上了卡尔曼滤波。测试结果表明,小车到达声源的位置较为准确。
关键词:时延算法;声源定位;超声波测距;麦克凤阵列;STM32
中图法分类号:TN912文献标识码:A
1 引言
声源定位小车是一种基于声学传感技术的智能机器人,它能够在那些复杂的环境中实现一些声源的定位和跟踪,具有广泛的应用前景。
目前,声源定位小车已在安防、智能家居、医疗等领域得到了广泛的应用,例如,在安防领域,声源定位小车可以通过定位报警设备的声源位置,实现对安全隐患的及时发现和处理;在智能家居领域,声源定位小车可以作为家庭智能助手,对家庭中的各种声源进行识别和分析,从而实现智能家居的控制和管理。然而,声源定位小车在实际应用中面临着许多挑战,如复杂的声音环境、定位精度、运动控制等方面的问题。因此,本文旨在研究和实现一种基于声学传感技术的声源定位小车,通过对声学信号的采集和分析,实现声源的准确定位和跟踪,以及对小车的运动控制。
本文基于麦克风阵列实现声源定位。麦克风阵列声源定位技术在阵列信号处理技术蓬勃发展的契机下诞生,能够在多种场景下对各种声音信号源定位。用麦克风阵列来采集处理声波信号受到越来越多学者及专家的关注[1] 。
2 总体设计
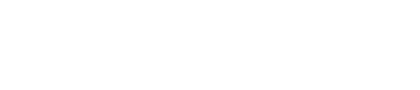
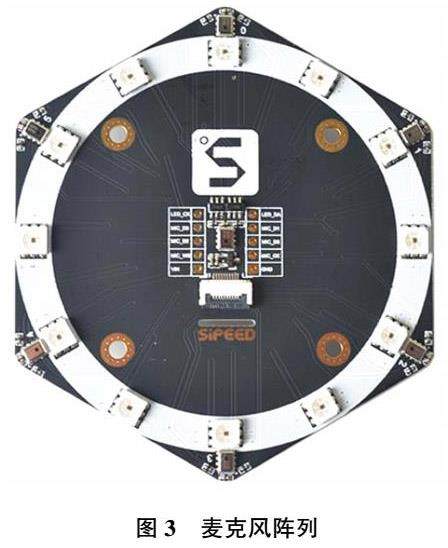
系统设计方案如图1 所示,以实现声源定位的要求。其采用“6 + 1”形式的数字麦克风阵列进行声源收集,K210 负责对收集到的声源进行处理和声源定位,STM32F103C8T6 作为主控,传感器模块包括编码器、超声波测距模块、OLED 显示屏,驱动模块有电机和驱动电路。
3 硬件设计
基于整体设计方案,本文对系统的主要部分进行详细设计。
3.1 STM32F103C8T6 主控板
STM32F103C8T6 为系统的主控板,它主要获取K210 通过串口发送的数据、收集超声波测距模块传过来的距离信息,使小车避障,并通过K210 发来的数据驱动小车。
3.2 K210 核心模块
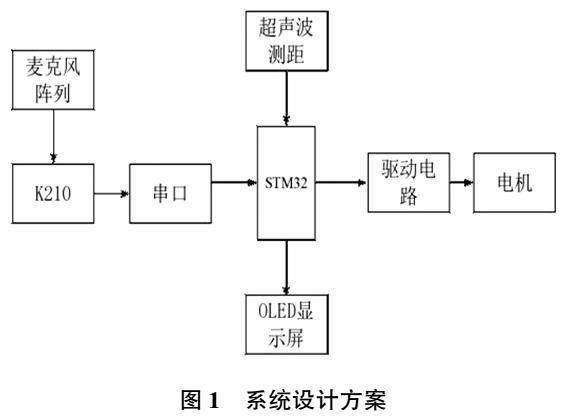
K210 可结合机器视觉和机器听觉能力,提供更强大的功能,如图2 所示,在应用中可以通过声源定位对目标进行跟踪,可以根据麦克风阵列确定一个说话人的方向。K210 的FPIOA 特性,支持每个外设随意映射到任意引脚,这使得K210 可以有多个I2S 的通道来处理麦克风阵列收集的音频。
3.3 OLED 显示屏
硬件的显示模块使用0.96 寸的OLED 屏幕,并采用I2C 的通信协议来连接STM32,精致小巧的特点使它便于安装在小车上并实时显示声源的角度和水平的距离。